Come mai i sottomarini hanno una velocità massima più elevata quando agiscono in immersione?
Come mai i sottomarini hanno una velocità massima più elevata quando agiscono in immersione?
Due fattori principali che causano la riduzione della velocità di superficie del sottomarino sono la cavitazione e la resistenza. I moderni sottomarini sono progettati per operare in immersione e, pertanto, subiscono una minore resistenza al moto quando sono sotto la superficie del mare.
Esiste più di un tipo di trascinamento dovuto al moto in acqua:
- La resistenza dell’acqua è la resistenza del rivestimento esterno al battello, e questa resistenza aumenta man mano che la superficie bagnata aumenta quando il sottomarino si immerge. I sottomarini moderni utilizzano una forma a goccia, che riduce al minimo questo tipo di resistenza;
- Un altro tipo di trascinamento è quello dell’onda che avviene sulla superficie marina dove l’acqua è libera di creare onde. Tutte le navi che viaggiano sulla superficie dell’acqua devono fare i conti con questo. La forma dell’arco ha un impatto. Un arco ad angolo acuto o un arco a bulbo può ridurre la resistenza delle onde. Ma la prua smussata di un sottomarino, che aiuta a ridurre la resistenza in immersione, aumenta la resistenza delle onde;
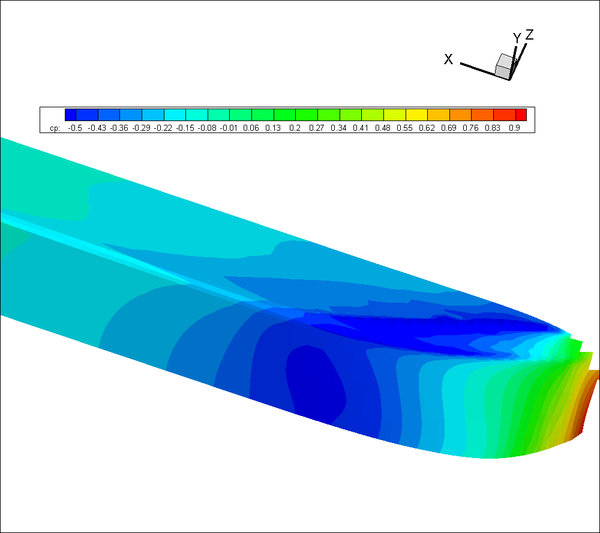
- In un fluido ideale (senza viscosità) non ci sarebbe resistenza sott’acqua su di una forma aerodinamica, ma produrrebbe comunque resistenza alle onde sulla superficie. Certo, l’acqua non è un fluido ideale, ma quasi. E anche i sottomarini ben idrodinamici hanno cavità, creste o antenne di vario genere;
- Quando il sottomarino è immerso, l’acqua spostata viene spinta in tutte le direzioni e la gravità ha un impatto molto minore; ciò riduce efficacemente la resistenza indotta dalla velocità dello scafo a un punto in cui può essere ignorata;
- La resistenza viscosa risale sott’acqua perché la superficie bagnata aumenta, ma questo è più che compensato dalla perdita di resistenza delle onde.
Il fenomeno della cavitazione
Uno dei limiti più importanti alle prestazioni di un’elica è la “Cavitazione” che si verifica quando l’acqua viene mossa troppo velocemente e provoca una caduta di pressione sufficiente a causare una bolla o un vuoto.
Queste “bolle” o “vuoti”, collassano e possono generare onde d’urto che possono danneggiare le eliche.
Per un sottomarino questo è un triplice problema: riduce la “spinta”, consuma l’elica e fa rumore, proprio l’opposto di quello che desidera l’equipaggio di un sottomarino.
In immersione la pressione dell’acqua farà sì che l’elica abbia meno tendenza alla cavitazione. Più si va in profondità meno ci sarà meno la cavitazione e senza cavitazione l’elica sarà pienamente efficiente creando propulsione in avanti. Quindi tutta la forza dei motori sarà utilizzabile.
Man mano che si va in profondità, la pressione iniziale aumenta, quindi se l’elica cavita a 5 metri di profondità, non caviterà a 15 metri di profondità. A 100 metri si potrà ottenere molta più potenza nell’elica senza che caviti, quindi il risultato è che si potrà ottenere abbastanza potenza per procedere più velocemente in profondità.
Prima e durante la seconda guerra mondiale, i sommergibili trascorrevano la maggior parte del tempo di navigazione in superficie. Ciò era dovuto alla limitata resistenza dei sottomarini in immersione. Era più importante ottimizzare la loro velocità in superficie in modo che la forma dello scafo assomigliasse a quella di qualsiasi altra nave di superficie. Ciò influenzò drasticamente la velocità in immersione del sommergibile. Al termine della seconda guerra mondiale, le tattiche antisommergibile divennero più efficaci e divenne evidente la necessità di una maggiore velocità e resistenza in immersione. I tedeschi furono i primi a iniziare a razionalizzare tutti gli aspetti dei loro sottomarini per migliorare la velocità e la resistenza in immersione con i sottomarini tipo XXI, sui quali si potevano notare tutte le protuberanze visibili racchiuse.
Ciò consentì al sottomarino una velocità sommersa sostanzialmente più elevata rispetto ai vecchi sommergibili tipo VII.
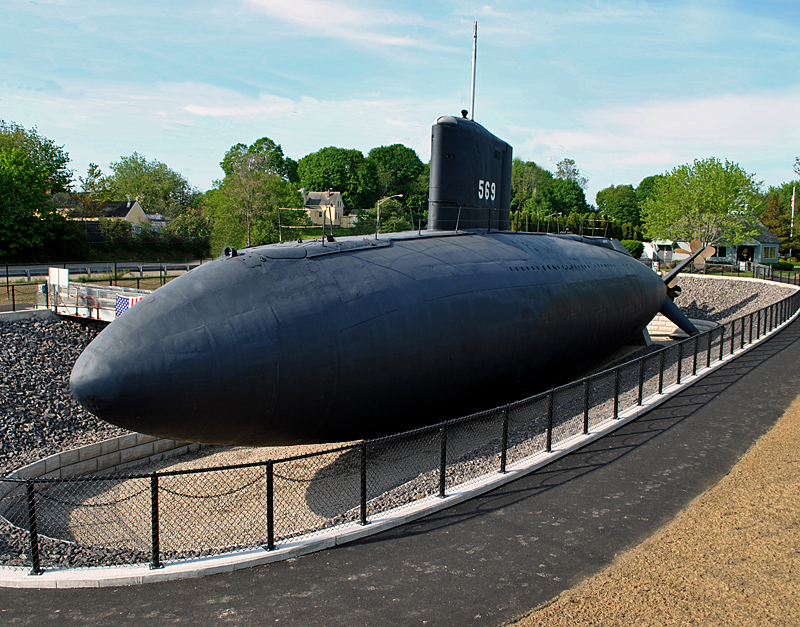
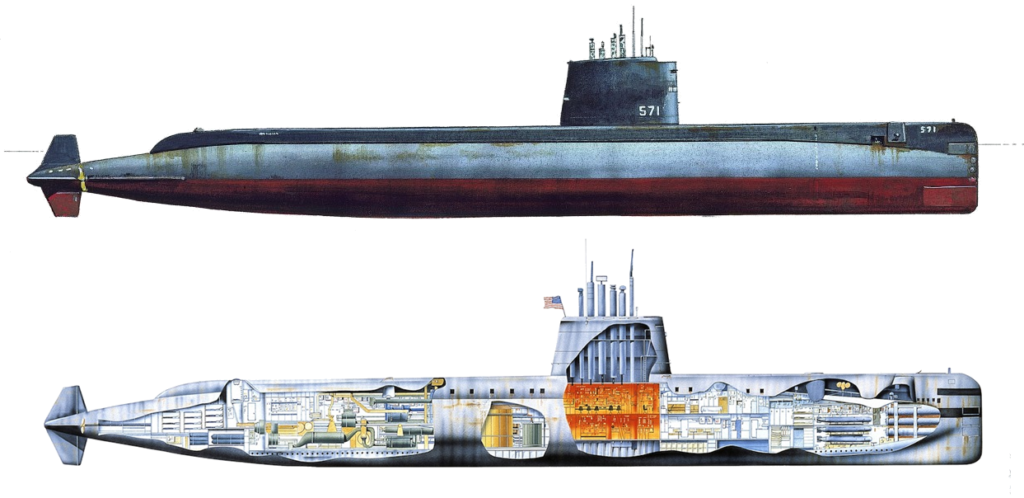
Il primo sottomarino a propulsione nucleare, l’USS Nautilus, utilizzava una forma di scafo molto simile a quella dei sottomarini tedeschi tipo XXI.
Subito dopo la US Navy progettò e costruì l’USS Albacore, un sottomarino di ricerca con lo scopo specifico di determinare la forma ottimale dello scafo, la configurazione della propulsione e la geometria della superficie di controllo per il funzionamento in immersione.
Con quella forma dello scafo, si scoprì che l’USS Albacore poteva operare alla stessa velocità in immersione dei sottomarini più vecchi (anche quelli tipo XXI tedeschi) per circa la metà della potenza all’albero motore richiesta. Ciò ha notevolmente migliorato la resistenza in immersione del sottomarino.
Questo è il motivo per cui i moderni sottomarini, con la loro forma dello scafo ottimizzata per il prevalente funzionamento in immersione, sono più lenti in superficie.
(Web, Google, navalpost, Wikipedia, You Tube)