
US Navy Conducts First Live-Control Flight of MQ-20 Using Unmanned Carrier Aviation Mission Control Station
{loadposition bannertop}
{loadposition sidebarpub}
On November 7, 2024, Lockheed Martin, in partnership with the U.S. Navy and General Atomics (GA), marked a major breakthrough in uncrewed aviation by successfully demonstrating the first live flight of an uncrewed air vehicle (UAV) controlled by the Uncrewed Mission Control Station (UMCS). This achievement, made possible by Lockheed Martin Skunk Works’ MDCX™ autonomy platform, represents a crucial step toward integrating uncrewed systems into naval operations and future autonomous warfare capabilities.
Follow Army Recognition on Google News at this link
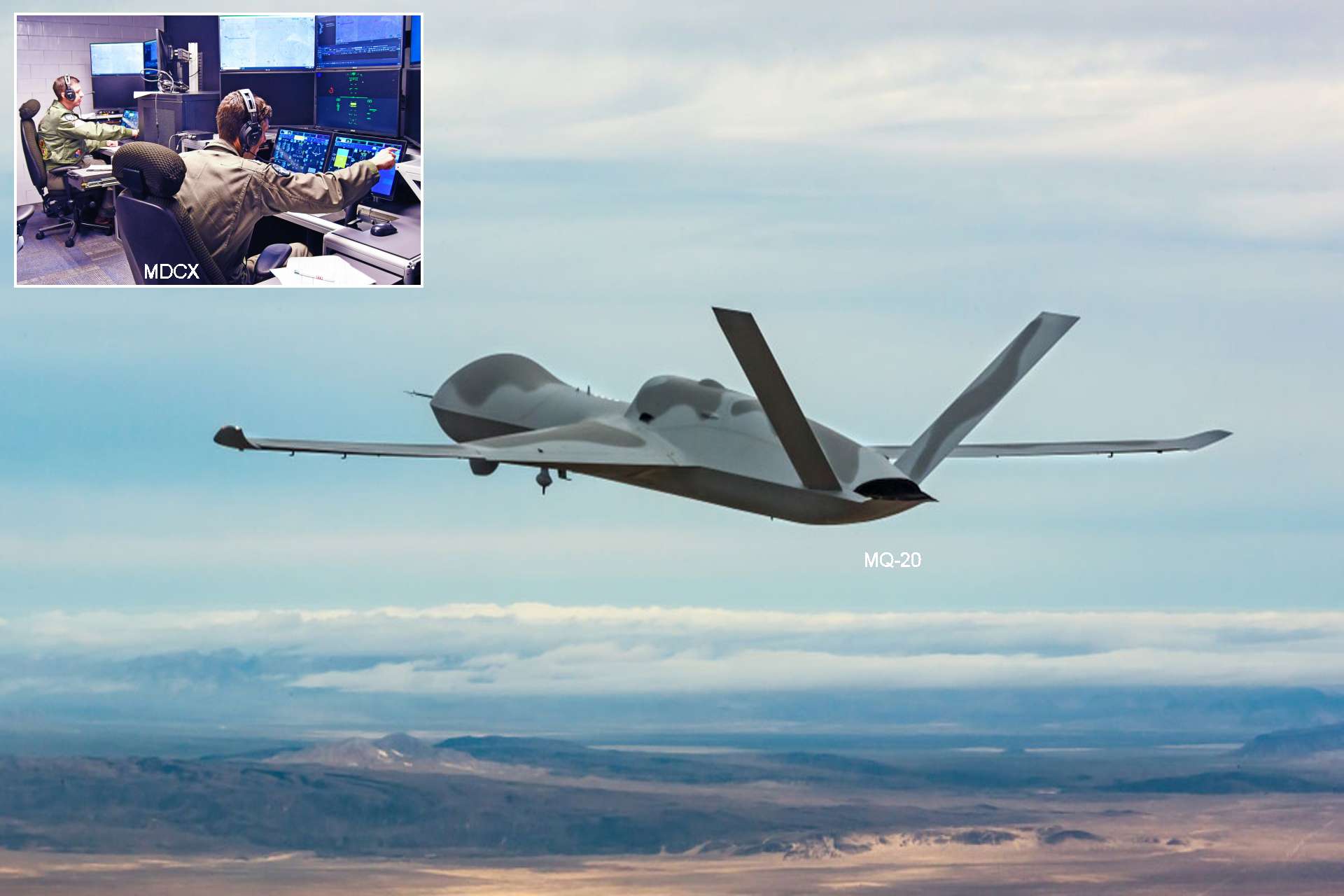
US Navy Tests GA MQ-20 Using Unmanned Carrier Aviation Mission Control Station (Picture source: GA-ASI and Lockheed Martin)
The origins of this project date back to the early 2010s, when the U.S. Armed Forces expressed a growing interest in developing autonomous combat systems to reduce risks for military personnel and enhance operational efficiency. In 2014, the Department of Defense launched the Advanced Autonomy Initiative for uncrewed systems, a multidisciplinary program aimed at integrating autonomous solutions and interoperable control systems. This program gained momentum in 2016, when the U.S. Navy began research for a common control station for uncrewed aerial systems (UMCS) capable of controlling various types of drones from ground bases and naval vessels. In 2019, Lockheed Martin Skunk Works joined the initiative as a key industry partner, tasked with developing the MDCX™ platform and collaborating with other companies, including General Atomics, to ensure system interoperability under the Collaborative Combat Aircraft (CCA) program. This partnership led to initial experimental lab tests in 2021, paving the way for real-world demonstrations like the one conducted today.
During this historic event, UMCS successfully controlled a GA MQ-20 Avenger UAV in a live flight mission, demonstrating the potential for advanced teaming between crewed and uncrewed systems as envisioned under the Collaborative Combat Aircraft (CCA) program. This flight test, conducted by Navy air vehicle pilots at Patuxent River, Maryland, remotely controlling the UAV’s flight in California, marks an essential step toward fully integrated uncrewed capabilities in naval operations.
The UMCS system, combined with the MDCX™ autonomy platform, is distinguished by its ability to operate UAVs beyond line of sight, facilitating greater autonomy and enhanced responsiveness in the field. Designed to integrate various UAVs and third-party systems, UMCS relies on a modular architecture and centralized command system that enables real-time control of complex missions. The MDCX™ platform offers an intuitive interface and secure communication protocols for coordinated remote operations, even in hostile environments. The MQ-20 Avenger used in this demonstration is equipped with advanced sensors and a flexible payload capacity, allowing it to perform a wide range of missions, from reconnaissance to tactical support.
In practice, this system would allow, for example, a U.S. aircraft carrier to conduct a surveillance mission in a sensitive area without exposing a human crew to risks. Once the mission is planned, UMCS operators remotely program the UAV to fly over an identified area and collect precise information using its advanced sensors. During the flight, if a target of interest is detected, operators can adapt the MQ-20’s mission in real-time, adjusting its trajectory and sensors to gather more detailed data. At every stage, the MDCX™ platform ensures secure and instantaneous communication, while the system’s autonomy allows the MQ-20 to automatically adjust its position to avoid detected threats. Once the mission is complete, the UAV returns to a secure location without direct human intervention, transmitting all collected information to UMCS operators for analysis.
Lockheed Martin’s MDCX platform played a central role in this achievement by rapidly integrating the MQ-20’s autonomy core with UMCS. According to John Clark, Vice President and General Manager of Lockheed Martin Skunk Works, this advancement brings the U.S. Navy closer to realizing its “Carrier Air Wing of the Future” vision. The demonstration highlighted MDCX’s common control capabilities and its ability to support third-party platform integration, a crucial aspect of multi-platform interoperability and advanced autonomy.
David R. Alexander, President of GA-ASI, emphasized that the successful control of the MQ-20 by UMCS illustrates the maturity of GA’s Tactical Autonomy Core Ecosystem (TacACE). This capability aligns with GA-ASI’s goal of developing mission-ready autonomous collaborative platforms at high technological readiness levels, showcasing readiness to advance beyond line-of-sight capabilities in uncrewed naval aviation.
Lieutenant Steven Wilster, MQ-25 UAV pilot, praised the historic nature of the demonstration, noting that it “paves the way for integrating critical uncrewed capability across the joint force to counter the high-level threats our warfighters face today and in the future.” This demonstration represents a strategic step for uncrewed naval aviation, providing critical data and insights that will refine UMCS requirements and guide future development and testing.
The U.S. Navy, in coordination with the U.S. Air Force and Marine Corps, is advancing under a Tri-Service Memorandum of Understanding aimed at developing interoperable control systems for CCA platforms. This collaboration seeks to establish a common control architecture and a Ground Control Station (GCS), benefiting from Lockheed Martin Skunk Works’ extensive experience with ground control systems based on the Open Mission Systems (OMS) architecture.
In the future, the Navy will leverage data from this demonstration to further refine UMCS requirements and enhance command and control technologies, moving toward a future where autonomous uncrewed systems operate in seamless partnership with crewed assets. This continued development will support the Navy’s broader goal of achieving integrated operations between crewed and uncrewed systems in complex mission environments, a crucial element of next-generation naval warfare capabilities.

{loadposition bannertop}
{loadposition sidebarpub}
On November 7, 2024, Lockheed Martin, in partnership with the U.S. Navy and General Atomics (GA), marked a major breakthrough in uncrewed aviation by successfully demonstrating the first live flight of an uncrewed air vehicle (UAV) controlled by the Uncrewed Mission Control Station (UMCS). This achievement, made possible by Lockheed Martin Skunk Works’ MDCX™ autonomy platform, represents a crucial step toward integrating uncrewed systems into naval operations and future autonomous warfare capabilities.
US Navy Tests GA MQ-20 Using Unmanned Carrier Aviation Mission Control Station (Picture source: GA-ASI and Lockheed Martin)
The origins of this project date back to the early 2010s, when the U.S. Armed Forces expressed a growing interest in developing autonomous combat systems to reduce risks for military personnel and enhance operational efficiency. In 2014, the Department of Defense launched the Advanced Autonomy Initiative for uncrewed systems, a multidisciplinary program aimed at integrating autonomous solutions and interoperable control systems. This program gained momentum in 2016, when the U.S. Navy began research for a common control station for uncrewed aerial systems (UMCS) capable of controlling various types of drones from ground bases and naval vessels. In 2019, Lockheed Martin Skunk Works joined the initiative as a key industry partner, tasked with developing the MDCX™ platform and collaborating with other companies, including General Atomics, to ensure system interoperability under the Collaborative Combat Aircraft (CCA) program. This partnership led to initial experimental lab tests in 2021, paving the way for real-world demonstrations like the one conducted today.
During this historic event, UMCS successfully controlled a GA MQ-20 Avenger UAV in a live flight mission, demonstrating the potential for advanced teaming between crewed and uncrewed systems as envisioned under the Collaborative Combat Aircraft (CCA) program. This flight test, conducted by Navy air vehicle pilots at Patuxent River, Maryland, remotely controlling the UAV’s flight in California, marks an essential step toward fully integrated uncrewed capabilities in naval operations.
The UMCS system, combined with the MDCX™ autonomy platform, is distinguished by its ability to operate UAVs beyond line of sight, facilitating greater autonomy and enhanced responsiveness in the field. Designed to integrate various UAVs and third-party systems, UMCS relies on a modular architecture and centralized command system that enables real-time control of complex missions. The MDCX™ platform offers an intuitive interface and secure communication protocols for coordinated remote operations, even in hostile environments. The MQ-20 Avenger used in this demonstration is equipped with advanced sensors and a flexible payload capacity, allowing it to perform a wide range of missions, from reconnaissance to tactical support.
In practice, this system would allow, for example, a U.S. aircraft carrier to conduct a surveillance mission in a sensitive area without exposing a human crew to risks. Once the mission is planned, UMCS operators remotely program the UAV to fly over an identified area and collect precise information using its advanced sensors. During the flight, if a target of interest is detected, operators can adapt the MQ-20’s mission in real-time, adjusting its trajectory and sensors to gather more detailed data. At every stage, the MDCX™ platform ensures secure and instantaneous communication, while the system’s autonomy allows the MQ-20 to automatically adjust its position to avoid detected threats. Once the mission is complete, the UAV returns to a secure location without direct human intervention, transmitting all collected information to UMCS operators for analysis.
Lockheed Martin’s MDCX platform played a central role in this achievement by rapidly integrating the MQ-20’s autonomy core with UMCS. According to John Clark, Vice President and General Manager of Lockheed Martin Skunk Works, this advancement brings the U.S. Navy closer to realizing its “Carrier Air Wing of the Future” vision. The demonstration highlighted MDCX’s common control capabilities and its ability to support third-party platform integration, a crucial aspect of multi-platform interoperability and advanced autonomy.
David R. Alexander, President of GA-ASI, emphasized that the successful control of the MQ-20 by UMCS illustrates the maturity of GA’s Tactical Autonomy Core Ecosystem (TacACE). This capability aligns with GA-ASI’s goal of developing mission-ready autonomous collaborative platforms at high technological readiness levels, showcasing readiness to advance beyond line-of-sight capabilities in uncrewed naval aviation.
Lieutenant Steven Wilster, MQ-25 UAV pilot, praised the historic nature of the demonstration, noting that it “paves the way for integrating critical uncrewed capability across the joint force to counter the high-level threats our warfighters face today and in the future.” This demonstration represents a strategic step for uncrewed naval aviation, providing critical data and insights that will refine UMCS requirements and guide future development and testing.
The U.S. Navy, in coordination with the U.S. Air Force and Marine Corps, is advancing under a Tri-Service Memorandum of Understanding aimed at developing interoperable control systems for CCA platforms. This collaboration seeks to establish a common control architecture and a Ground Control Station (GCS), benefiting from Lockheed Martin Skunk Works’ extensive experience with ground control systems based on the Open Mission Systems (OMS) architecture.
In the future, the Navy will leverage data from this demonstration to further refine UMCS requirements and enhance command and control technologies, moving toward a future where autonomous uncrewed systems operate in seamless partnership with crewed assets. This continued development will support the Navy’s broader goal of achieving integrated operations between crewed and uncrewed systems in complex mission environments, a crucial element of next-generation naval warfare capabilities.




